


















Вместе с ростом популярности кроссоверов растет и спрос на полный привод. Однако, полный полному приводу рознь, и бывает так, что даже для одного автомобиля доступно сразу несколько разных вариантов трансмиссии со всеми ведущими колесами. Всего же можно выделить четыре основных вида систем 4×4. Давайте познакомимся с каждой из них детальнее. Но сначала традиционно немного истории.
Первые автомобили со всеми ведущими начали появляться еще на заре автомобилестроения. Уже в 1903 году голландская фирма Spyker представила миру гоночный полноприводный Spyker 60/80 НР. Интересно, что у этой машины уже в те годы был межосевой дифференциал (о нем поговорим чуть позже).
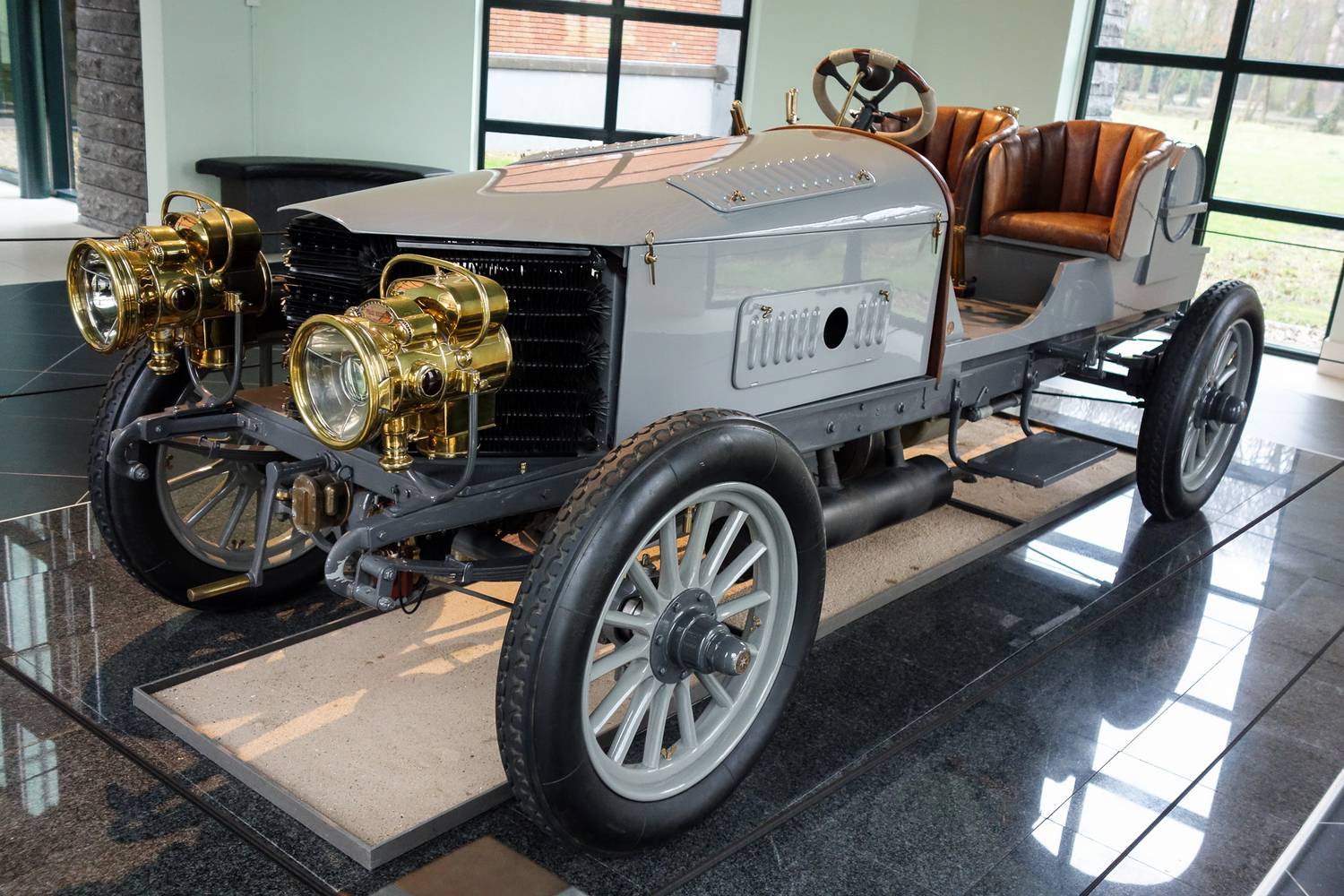
Полноприводный Spyker 60/80 НР 1903 года
А 1907 год можно считать годом рождения первого внедорожника, потому что по заказу немецкого Министерства по делам колоний (чего только не было в начале 20-го столетия!) компания Daimler создала автомобиль Dernburg Wagen. Этот автомобиль был нужен для дальних рейсов по африканскому бездорожью. Он имел систему полного привода, а детали подвески и механизмы рулевого управления были закрыты защитными кожухами, которые сократили угол поворота колес всего лишь до 23 градусов, что при длине машины в почти пять метров значительно ухудшало манёвренность. Для решения этой проблемы задние колеса также были сделаны управляемыми. Это делает Daimler Dernburg Wagen еще и первым полноприводным внедорожником с полноуправляемым шасси. И это в 1907 году! Что же, все новое – это хорошо забытое старое.

Daimler Dernburg Wagen – первый полноприводный внедорожник с полноуправлемым шасси
Daimler Dernburg показал, что для улучшения проходимости полный привод обязателен. Однако его необходимость для улучшения ездовых характеристик по хорошим дорогам еще долгие годы будет оставаться под вопросом. Так, в 1920 – 1930-х годах было создано ряд гоночных машин со всеми ведущими, таких как Miller 91 и Bugatti Type 53. Они имели преимущество перед моноприводными соперниками в сцеплении с дорогой, однако большие потери мощности, высокий расход топлива и сложность управления ясно давали понять: время полного привода на легковом автомобиле еще не пришло.
Понадобилось полвека развития технологий и инженерных компетенций для того, чтобы создать по-настоящему эффективную легковую систему 4×4. Серийно она появилась на легендарной Audi quattro в 1980 году, которая в том числе стала одной из самых успешных машин в раллийной группе Б, и на которой дважды был выигран чемпионат мира по ралли WRC. Именно спортивные успехи Audi заставили автомобильный мир по-новому взглянуть на перспективы полного привода для легковых автомобилей. Сегодня же системы со всеми ведущими могут встретиться как на суровом внедорожнике, так и на небольшом хэтчбеке.
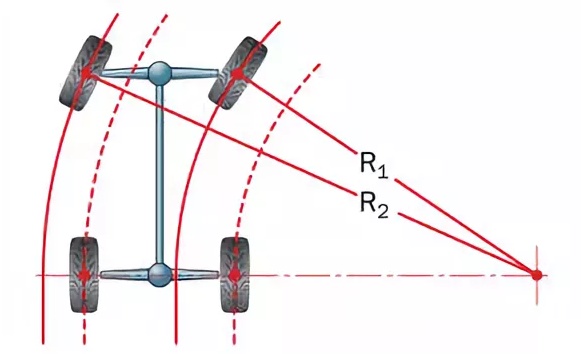
Задняя и передняя ось автомобиля проезжают разную дистанцию в повороте
Одной из главных проблем при создании полноприводной машины является то, что при движении в повороте передние и задние колеса автомобиля катятся по разным траекториям. Это значит, что в системе полного привода должно быть устройство, которое будет разделять момент между осями в нужных пропорциях, позволяя вращаться им с разной угловой скоростью. Такое устройство называется дифференциал.
Однако есть полноприводные схемы и без дифференциалов. Мы уже выяснили, что бывает четыре основных типа систем полного привода: подключаемый полный привод, полный привод по требованию, постоянный полный привод и электронно-управляемый полный привод. Наиболее простой является система с подключаемым полным приводом. С нее и начнем.
Подключаемый полный привод (part-time)
Автомобили с такой трансмиссией по умолчанию являются, как правило, заднеприводными. Передний мост здесь подключается при помощи раздаточной коробки, которая обеспечивает равное распределение момента между передней и задней осью. И это именно та схема полного привода, в которой отсутствует межосевой дифференциал. «Как же тогда автомобиль поворачивает?» – спросите вы. С включенным полным приводом на сухом покрытии – очень плохо. Из-за того, что передняя и задняя ось вращаются с равной скоростью, проезжая при этом разную дистанцию, колеса оси, описывающей меньший радиус, постоянно пытаются сорваться в пробуксовку, что на сухом покрытии ведет к огромному радиусу разворота, повышенному износу покрышек и трансмиссии. Поэтому на машинах с подключаемым полным приводом подключать этот самый привод можно только на скользких поверхностях: в песке, снегу или грязи. По асфальту же на таких авто можно ездить строго на моноприводе, что требует от водителя устойчивых навыков управления заднеприводной машиной.

Подключаемый полный привод применяется как правило на серьезных внедорожниках и пикапах
К достоинствам такой трансмиссии можно отнести простоту, прочность и надежность. И если отсутствие межосевого дифференциала при движении по асфальту создает кучу проблем, то на бездорожье кучу проблем может создать уже его присутствие. Дифференциал устроен таким образом, что если скорость вращения одной оси падает на 20 %, то на другой оси она возрастет на 20%. Но если одна ось окажется на скользком покрытии и начнет буксовать, а вторая будет стоять на твердом, то, как на зло, весь момент уйдет на те колеса, которые имеют меньшее сцепление, и машина сама себя загонит в ловушку. У автомобилей с жестко подключаемым «передком» такого случиться не может, потому что межосевого дифференциала у них попросту нет, а межколесные, как правило, имеют блокировку (при включении блокировки дифференциал перестает перераспределять момент). Такой полный привод отлично подходит для покорения сурового бездорожья, но вот при обычной езде по хорошим дорогам толку от него мало. Поэтому и применяется такая система на серьезных внедорожниках.
Полный привод “по требованию”
Популярной в классе компактныхи и среднеразмерных кроссоверов является система полного привода по требованию. Такая трансмиссия, как правило, имеет три режима. По умолчанию автомобиль, как и в случае с отключаемым полным приводом, остается моноприводным. Если впереди машину ждет скользкий участок или легкое бездорожье водитель может перейти в автоматический режим трансмиссии. В таком случае при пробуксовке основных ведущих, скажем, передних колес, автоматически будет подключаться задняя ось. А третий режим – это блокировка межосевой муфты. В нем момент распределяется поровну между осями. Нужно это для прохождения участков серьезного бездорожья.

Три режима полного привода по требованию: только передний, автоматическое подключение полного и жесткое включение всех ведущих
Кажется, что в этой системе объединены достоинства подключаемого полного привода и монопривода. Но на деле выходит, что такая трансмиссия сильно уступает по внедорожным возможности системам с жестко подключением «передком» из-за того, что вискомуфта, которая здесь играет роль межосевого дифференциала и перераспределяет момент по осям, при длительных пробуксовках быстро перегревается. А на скользких покрытиях при обычной езде ей не всегда хватает скорости срабатывания, из-за чего полный привод подключается с задержкой. Поэтому водитель по факту получает просто моноприводную машину с более широкими возможностями.
Постоянный полный привод
Как следует из названия, машины с такой системой всегда остаются полноприводными. В таких трансмиссиях используется межосевой дифференциал. Как мы помним, его наличие означает, что в случае буксования одного колеса на него и уйдет весь момент и автомобиль станет неподвижным. Поэтому часто в такие трансмиссии внедряют различные системы блокировок дифференциалов. Одной из самых популярных систем постоянного полного привода является трансмиссия на основе дифференциала типа Torsen (Torque sensitive LSD – чувствительный к моменту дифференциал повышенного трения). Это самоблокирующийся дифференциал, однако, часто его дополняют системой принудительной блокировки для улучшения перераспределения моментов по осям.
Автомобили с хорошо настроенным постоянным полным приводом могут хорошо себя проявлять как на бездорожье, так и при езде по асфальту и скользким дорогам.
Электронно-управляемый полный привод
Развитие технологий привело к созданию продвинутых систем полного привода, которые совмещают в себе достоинства всех рассмотренных выше схем. В них управление распределением момента по колесам возложено на умную электронику. Полноприводных систем такого типа сегодня существует огромное количество. Наиболее распространенной является трансмиссия с муфтой Haldex. В ней роль межосевого дифференциала выполняет многодисковая гидравлическая муфта с электронным управлением. Haldex 5-го поколения по умолчанию отправляет только 5% процентов момента на ведомые (как правило, задние) колеса. В случае пробуксовки ведущих колес она может отправить до 50% момента на другую ось.
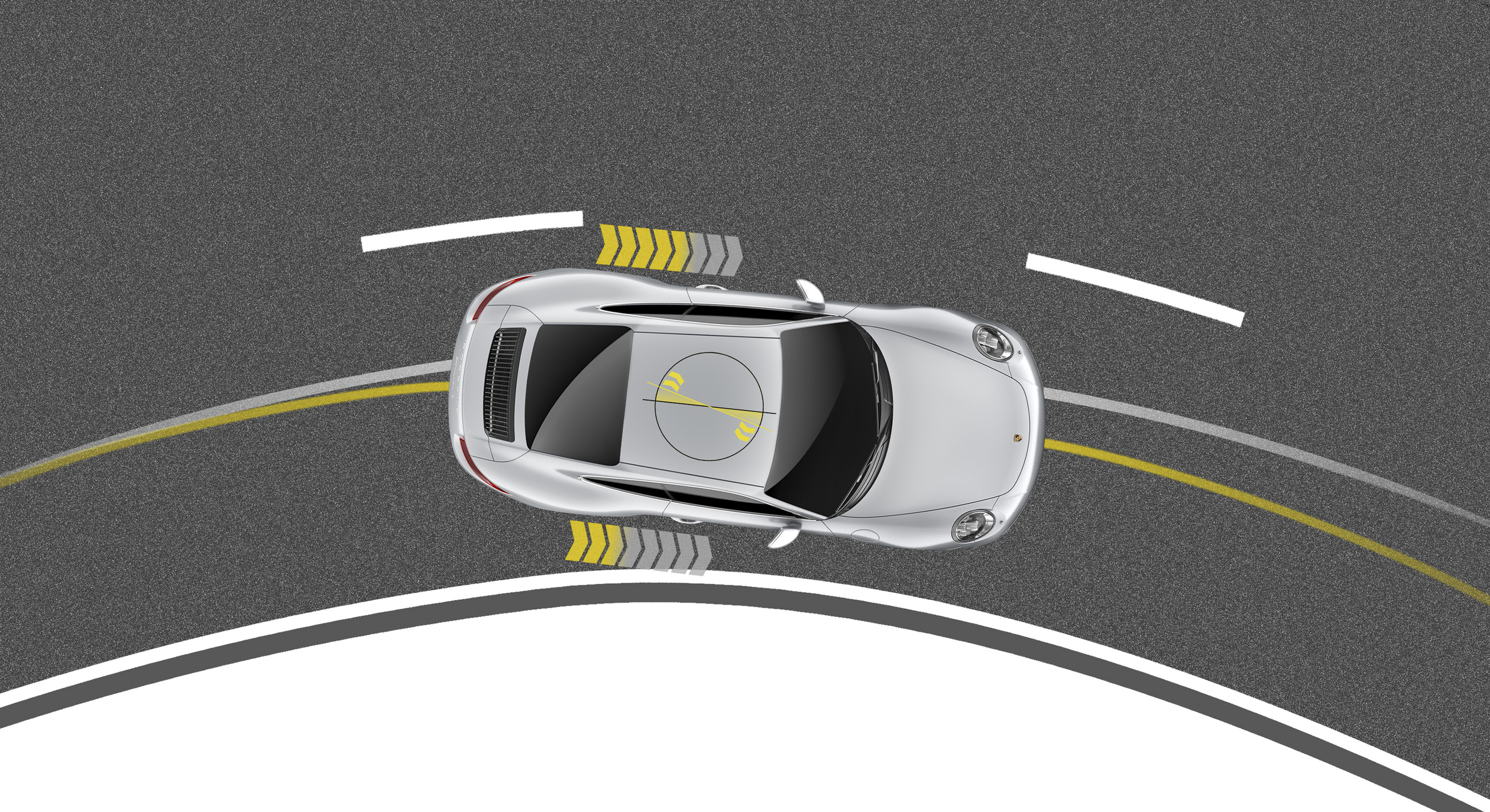
Системы электронно-управляемого полного привода с торк векторингом могут распределять момент между колёсами таким образом, чтобы ввинчивать машину в поворот
Также все чаще применяются трансмиссии с системами торк-векторинга. В них вместо заднего межколесного дифференциала устанавливаются управляемые электроникой гидромуфты, которые в поворотах распределяют момент таким образом, чтобы принудительно подтормаживать внутреннее колесо, ввинчивая машину в поворот. Есть также системы, в которых возможно отключение одной из осей, как, например, в нынешней BMW M5.
Современный полный привод – это сложнейшая система, которая при помощи продвинутой мехатроники и гидравлики может обеспечивать отличное сцепление с дорогой при быстрой езде и достойную проходимость на бездорожье. Отдельно стоит упомянуть про гибридные системы, где одна ось приводится в действие двигателем внутреннего сгорания, а другая – электромотором. Кажется, такой полный привод вскоре станет очень популярным. А какую полноприводную схему вы считаете лучшей?








